Space missions are a complex and costly affair, with a plethora of things that could potentially go wrong. This is especially true for robots and vehicles operating on distant celestial bodies like the Moon and Mars. Just imagine: something as simple as a rover getting stuck can completely derail the mission or even lead to its total abandonment!
Take, for instance, NASA’s Opportunity rover. Back in 2005, it found itself buried in sand for six long weeks, with experts desperately working on solutions from the Jet Propulsion Laboratory to set it free. And just recently, NASA’s Perseverance rover faced a similar dilemma when its drill bit got stuck, although they managed to sort that issue out fairly quickly.
Unfortunately, not all outcomes are as fortunate as that. Let’s not forget about the Spirit rover, which got trapped on a slope in 2009 and was ultimately never able to be rescued. After struggling against the Martian winter for a couple of years, the mission was called off.
Finding the Flaw
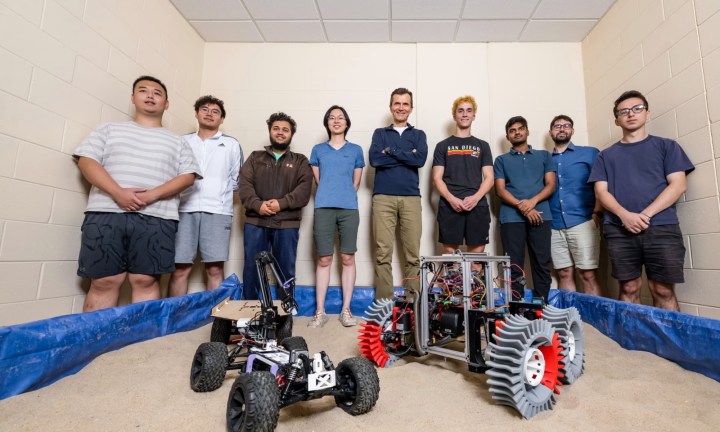
But there’s some good news! Engineers from the University of Wisconsin–Madison have just identified a flaw in how rovers get tested on Earth. These protocols tend to look at things a little too optimistically when it comes to what they’ll encounter on alien surfaces. Typically, these machines are tested in dry, desert-like conditions that mimic the Moon and Mars, taking gravity into consideration—but not quite enough.
The UW-Madison team noted that these tests often overlook an important factor: the way that the gravity of Earth acts on the sand particles. This lack of sensitivity leads to simulations that don’t reflect what will truly happen in the gravity-challenged environments of the Moon and Mars. According to the team, understanding exactly how a rover will handle movement over extraterrestrial surfaces is crucial in preventing it from getting caught in tricky, soft terrains or rocky places. You can find out more about this research here.
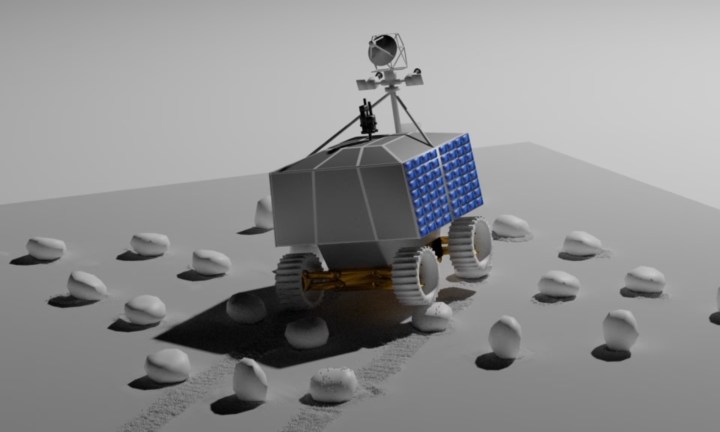
This is also the team behind simulation modeling for NASA’s VIPER rover. The Volatiles Investigating Polar Exploration Rover was proposed to scout for water and resources on the Moon’s more challenging regions, but sadly, that mission was canceled in 2024.
The researchers made this discovery while using open-source simulation software known as Chrono, which is also applied to test military vehicles’ off-roading abilities. They’ve shared their discoveries in an article published in the Journal of Field Robotics.
Making Rover Missions Safer
The UW-Madison team continues to sharpen their focus on rover technology for future space explorations. They explained that Earth’s gravitational pull causes sand particles to behave differently than they would in lower gravity conditions on the Moon or Mars.
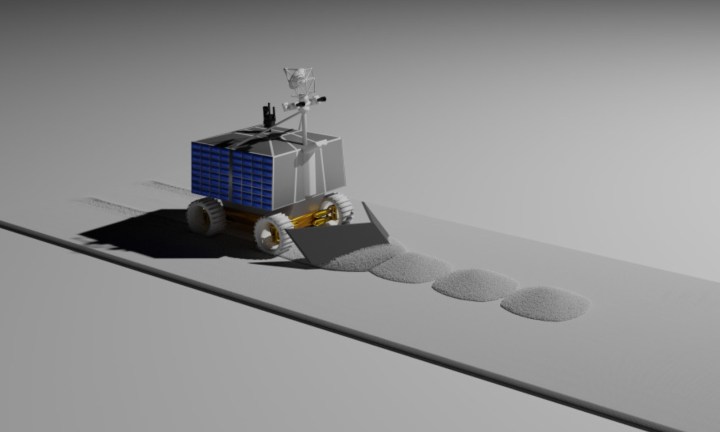
Interestingly, sand on Earth tends to be a bit stiffer, while the lunar surface is more pliable, resulting in a different kind of traction that affects how a rover interacts with the terrain.
The software at the center of this insightful discovery isn’t just for space exploration—it’s utilized across various fields. Apart from educational institutions, other prominent users include U.S. Army Ground Vehicle Systems Center, NASA’s Jet Propulsion Lab, and several research facilities.
For example, experts from Politecnico di Milano in Italy utilized Chrono for the Mascot lander on the asteroid Ryugu mission. Beyond vehicle testing, this robust software even helps design mini-mechanisms for watches!