Underneath the Moon’s dusty exterior lie hidden depths, including pits and lava tubes that could be promising habitats for future human missions. These underground areas offer protection from radiation, micrometeorites, and the harsh temperature shifts present on the lunar surface. Yet, accessing them presents a significant challenge. A research team spearheaded by Professor Dae-Young Lee at KAIST may have found a practical solution. They recently unveiled their latest findings in a publication on Science.org, introducing a novel airless wheel design tailored to tackle the Moon’s daunting terrain without unnecessary mechanical complexity.
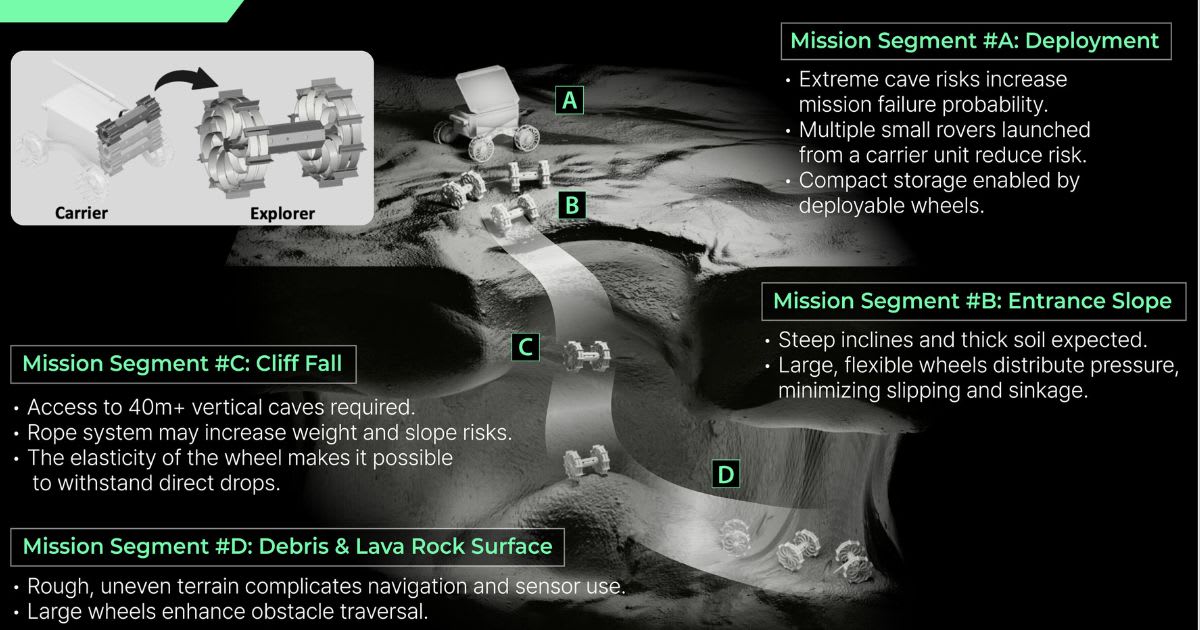
The team highlights how exploring these lunar features requires navigating challenging terrains, such as steep slopes near cave entrances and vertical drop-offs. To address this, they’ve created a flexible wheel that alters its shape without using hinges or inflation. This innovative design is based on what they call a “reconfigurable reciprocal structure,” with elastic steel strips woven in a helical pattern, allowing it to alter its shape without compromising its strength.
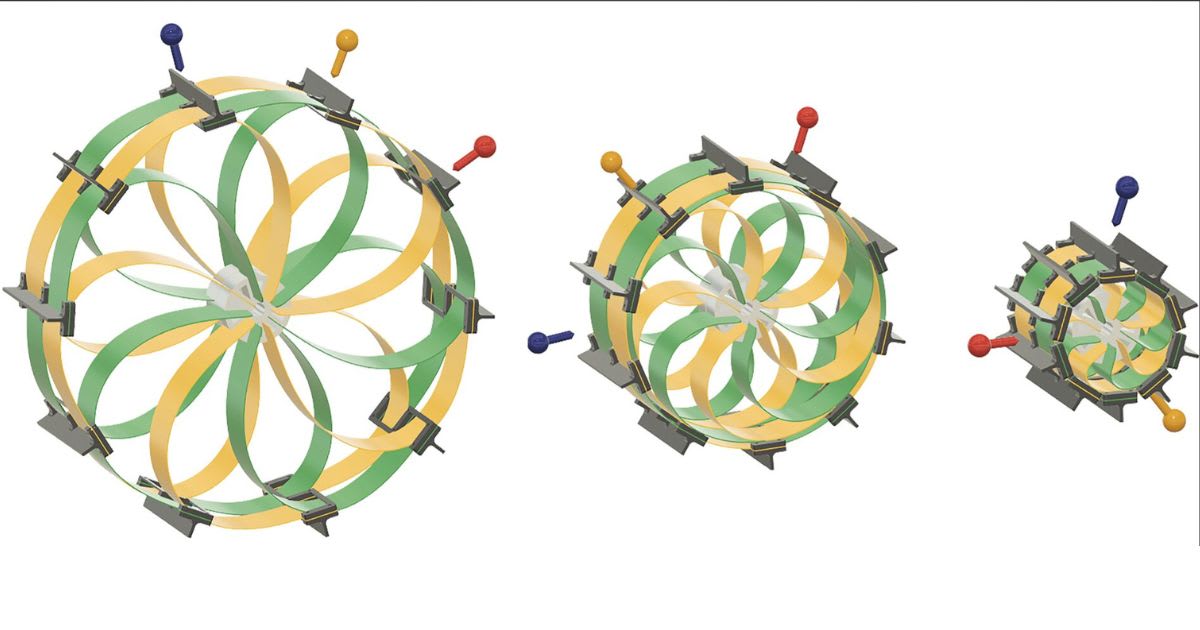
The research reveals that the wheel can adjust its diameter from 230 mm to 500 mm, and unlike many traditional designs that depend on rigid joints—which are prone to damage from shocks and lunar conditions—this design minimizes the number of components that may fail. Instead of succumbing to stress, the wheel redistributes it. “By effectively customizing strain across the wheel’s body, we reduce reliance on fragile parts,” the researchers point out. This results in a fantastic balance of flexibility and robustness.
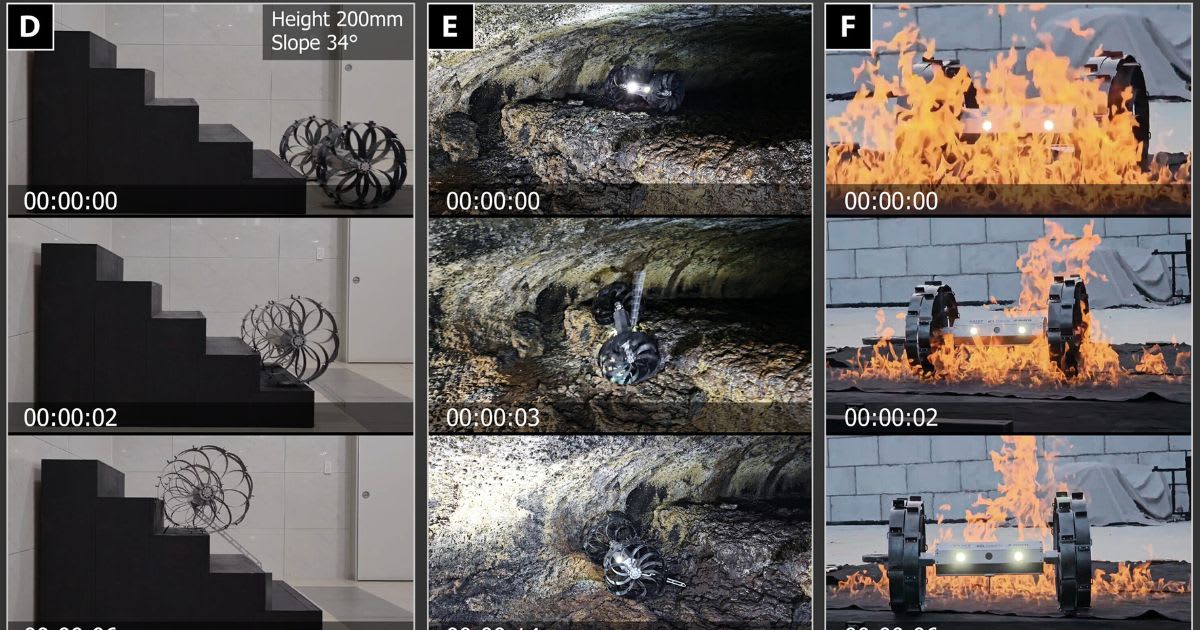
Testing has showcased the wheel’s toughness, showcasing its ability to surmount 200mm obstacles and maintain stable mobility over lunar simulant terrain while enduring impact similar to a fall from 100 meters in the Moon’s gravitational pull. This finding is particularly significant; it hints that future rovers equipped with this wheel could be directly deployed into lunar pits without the need for complex systems. Inside these pits, the wheel’s flexible design makes it adept at navigating tricky rocky surfaces while still gripping the terrain.
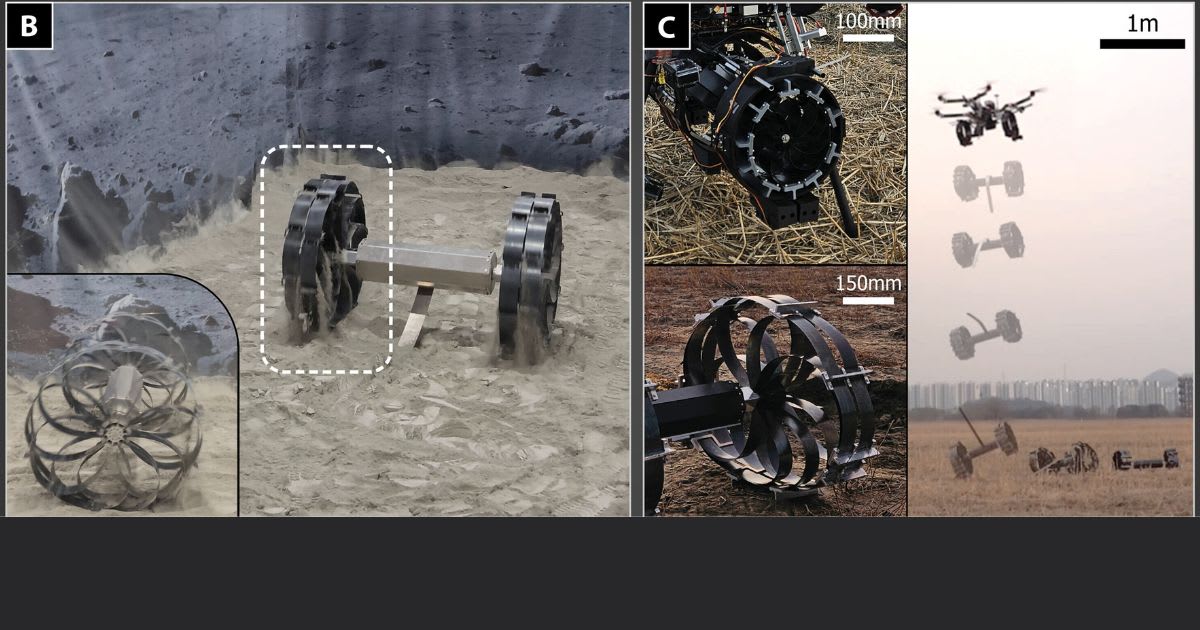
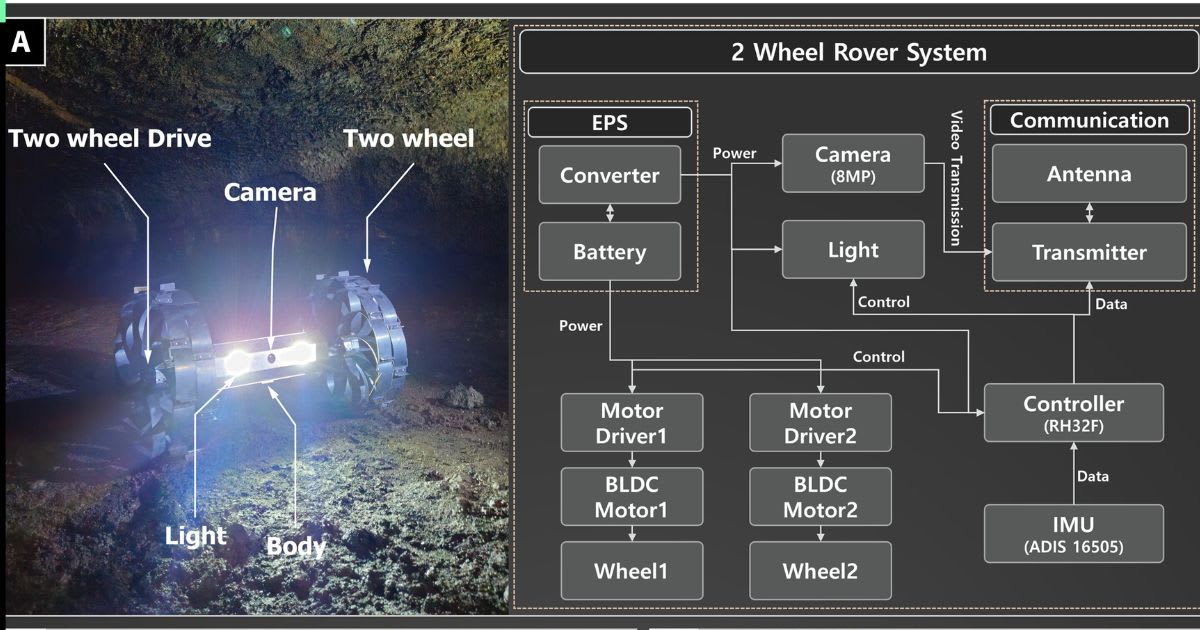
While the project hasn’t yet resulted in a space-ready rover system, the adaptable nature of this wheel design opens up avenues for integration into small rovers without a significant weight burden on the main body. The team anticipates combining it with upcoming microrover missions, tailoring scenarios for exploring lunar lava tubes.
By merging principles of soft robotics with resilient materials, Professor Lee’s team illustrates that exploration doesn’t have to revolve around complex designs. In fact, fewer components along with clever engineering can precisely meet the demands of space adventures. If integrated into future lunar missions, this innovative wheel could play a key role in helping humanity uncover some of the Moon’s most concealed and scientifically insightful environments, paving the way for life beyond Earth.